41 3242-0316
41 3343-1574

- INTRODUÇÃO
Este documento é um passo a passo para implementar programas de segurança em controladores ABB Pluto com ligação em rede segura. Admite-se que o profissional já possua conhecimentos básicos em elétrica/automação e programação em linguagem LADDER, bem como o software Pluto Manager. Neste documento iremos abordar apenas a comunicação entre controladores Pluto. A comunicação com a IHM ABB CP600 será explicada em outro Application Note.
HARDWARE
Controladores de Segurança: ABB Pluto D20
Módulos de endereçamento: ABB IDFIX-R
Fonte de Alimentação: ABB CPE-24/2,5
SOFTWARE
ABB Pluto Manager v2.42
- TOPOLOGIA
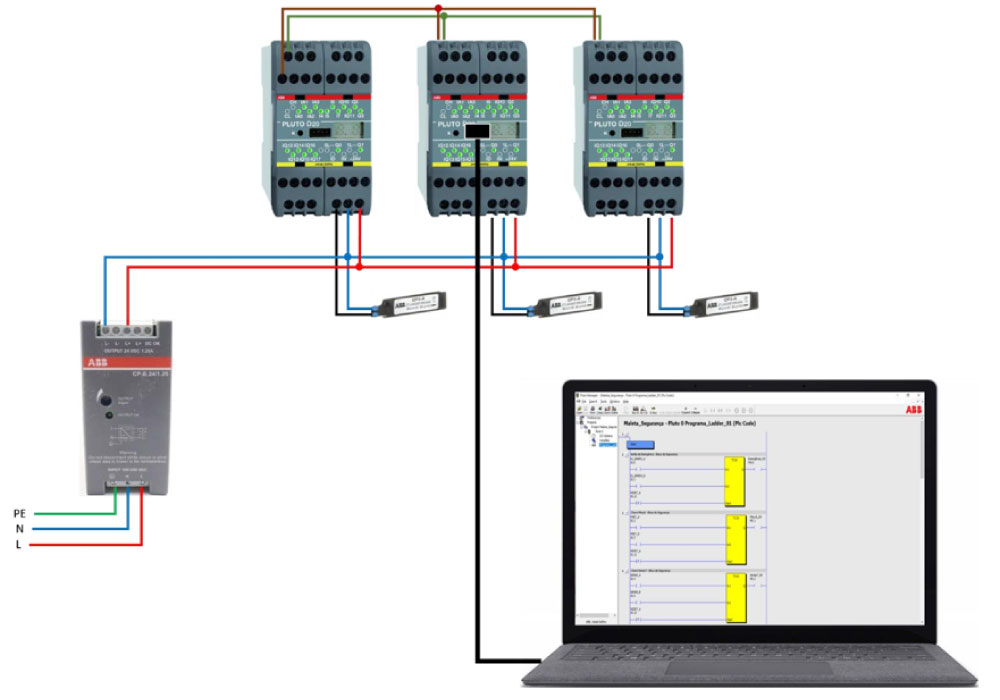
PASSO 01 – LIGAÇÕES ELÉTRICAS
a) Ligar os termnais +24V e 0V dos controladores, para alimentação do sistema.
b) Conectar os dois fios de cada módulo IDFIX nos respectivos terminais de cada Pluto:
- fio PRETO: borne “ID” do controlador
- fio AZUL: borne “0V” do controlador

c) Interligar todos terminais “CH” e todos os terminais “CL”, utilizando um cabo par trançado. Se os Plutos estiverem em paineis diferentes ou próximos a cabos de corrente alternada, recomenda-se utilizar um cabo blindado com a malha aterrada. Caso a rede possua um Pluto-Gateway para comunicar com redes externas, este também deverá receber um módulo IDFIX e se conectar aos demais Plutos através dos termninais “CH” e “CL”.
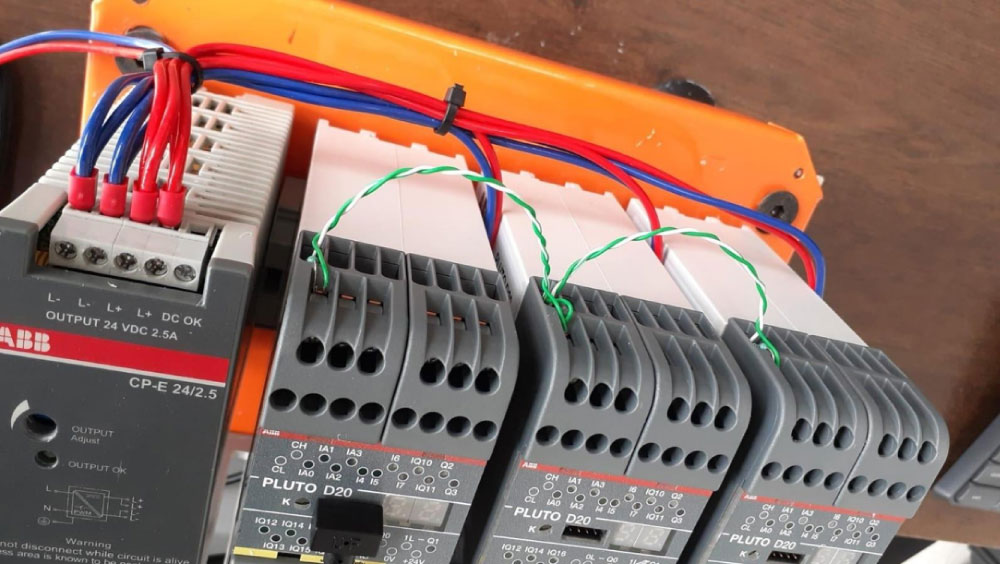
OBS: o controlador de segurança Pluto sai de fábrica com um resistor de terminação conectado entre os terminais CH e CL. Esses resistores devem ser removidos dos controladores intermediários, permanecendo apenas no primeiro e no último controlador (extremidades do cabo), conforme mostra a imagem acima. Até 32 dispositivos podem ser conectados em uma mesma rede.
a) Ligar o cabo de programação na porta USB do computador e em qualquer um dos conectores frontais dos controladores.
OBS: a rede do Pluto utiliza uma arquitetura multi-mestre para comunicação entre os módulos. O compilador do software irá gerar um único arquivo para download, que é transmitido simultaneamente para todos os controladores, independentemente de qual deles foi utilizado para conectar o cabo de programação.
Neste exemplo, temos o cabo de programação conectado ao Pluto 1, mas não haveria qualquer diferença se estivesse conectado no Pluto 0 ou no Pluto 2:

PASSO 02 – CONFIGURAÇÃO DA REDE
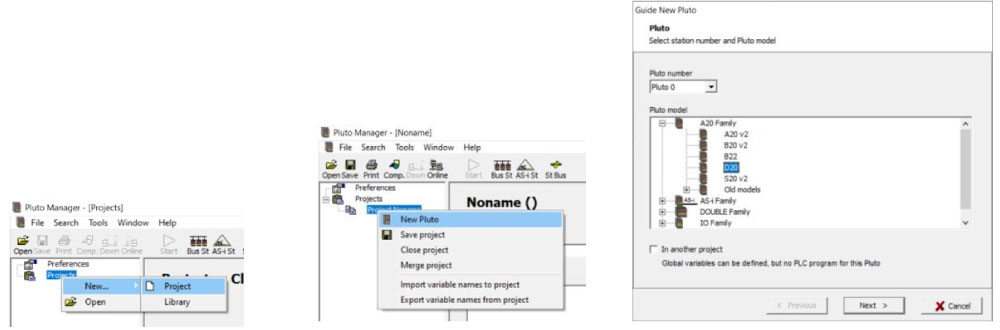
a) Na árvore lateral, duplo clique em “Preferences”, e selecionar a porta USB que contém o cabo de programação (VCP0):

b) Iniciar um novo projeto para adicionar os controladores. Em nosso exemplo, serão três “Pluto D20”:
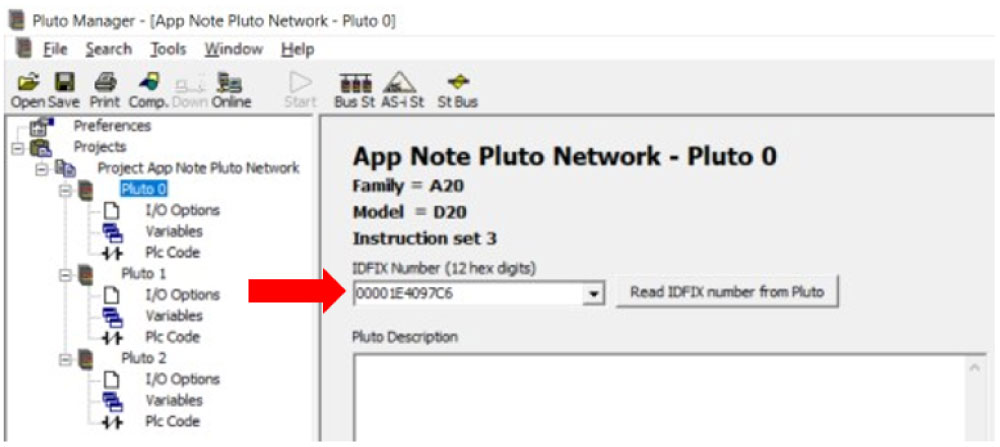
c) Na após adicionar os controladores, eles estarão listados na árvore lateral, onde devemos selecionar cada um para ler o número do módulo IDFIX que conectamos previamente. Ao pressionar o botão “Read IDFIX number from Pluto” na tela do programa, uma mensagem será exibida na tela, solicitando que o botão físico “K”, do Pluto correspondente, seja pressionado. O botão “K” fica bem ao lado do conector frontal do Pluto, e necessita de um objeto estreito, como um clipe de papel, para ser acessado:
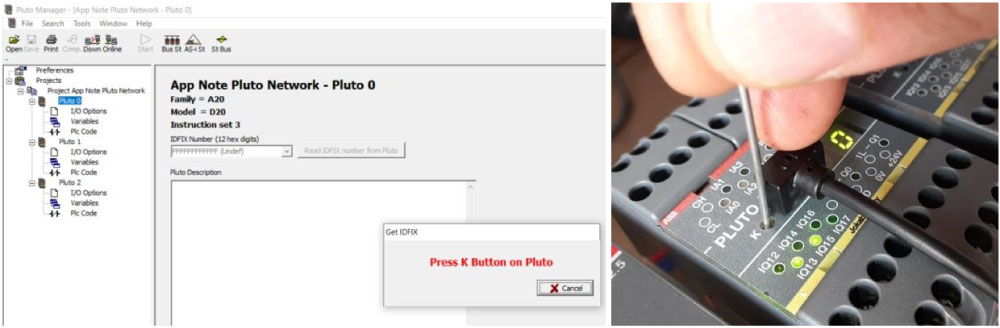
Basta pressionar levemente o botão “K” para que o IDFIX seja reconhecido. O Número do IDFIX passa a ser mostrado no campo correspondente. Cada IDIFX possui um número serial único.
Repita este procedimento para cada um dos controladores da rede. O número do Pluto, que passa a ser indicado no display frontal do mesmo, representa a associação com o respectivo item na árvore lateral do programa.
PASSO 03 – CONFIGURAÇÃO DAS PORTAS
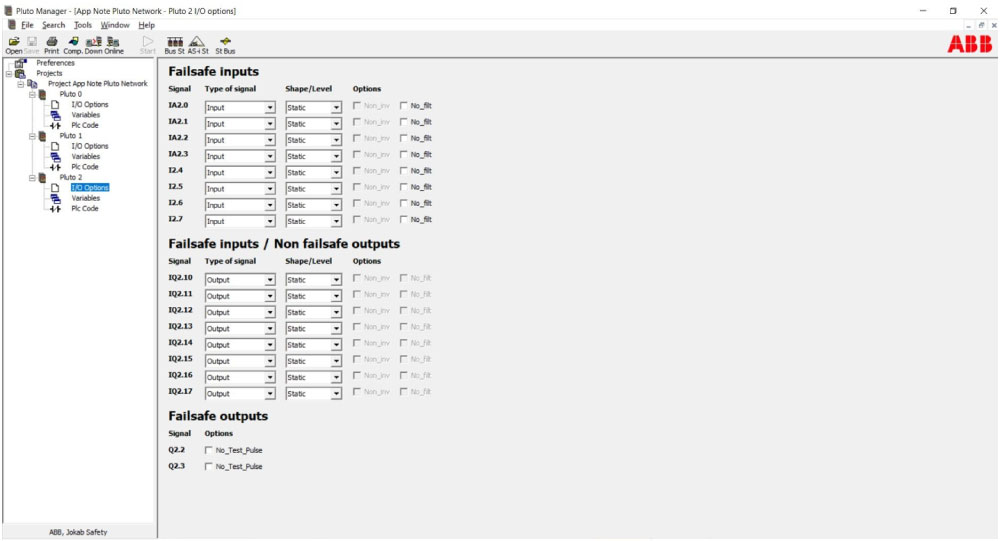
Dentro de cada Pluto, na árvore lateral, temos o subitem “I/O Options” onde cada porta do controlador deve ser configurada para a função desejada. Por padrão, todas as portas estarão com a configuração “Undefined” e, portanto, estarão inativas.
Em nosso exemplo, vamos configurar todas as portas “Failsafe inputs” para a função “Input” com nível “Static”. Isso permitirá testar as portas de entrada aplicando uma tensão 24V diretamente ao terminal correspondente.
Da mesma forma, todas as portas “Failsafe inputs / Non failsafe outputs” serão configuradas com a função “Output” e nível “Static”. Assim as mesmas poderão ser testadas com um multímetro comum ou um sinaleiro LED 24V.
A configuração das portas deve ser executada em todos os Plutos da rede.
PASSO 04 – EXPORTAÇÃO DE VARIÁVEIS
No subitem “Variables” de cada Pluto da árvore lateral, temos várias abas contendo os diferentes tipos de variável disponíveis no controlador:
- Safety Inputs;
- Safety Outputs;
- NonSafety Outputs;
- Global Memories;
- Memories;
- Registers;
- Double Registers:
- System Memories:
- System Registers.
As variáveis que possuem a indicação [G] são naturalmente globais e podem ser acessadas por todos os Plutos e Gateways ligados na mesma rede.
As demais variáveis podem ser selecionadas para exportação, clicando com o botão direito do mouse sobre a mesma e pressionando o botão que aparece, conforme este exemplo:
Ao ser marcada para exportação, a variável passa a exibir o indicador [E] ao lado. Todos os Plutos podem acessar todas as variáveis exportadas.
As variáveis exportadas são transmitidas na rede através de telegramas extras, que são pacotes de 32 bits de dados. Cada Pluto pode exportar até 4 telegramas, equivalente a 128 bits, que podem ser ocupados por memórias simples (1 bit), registradores (16 bits) ou registradores duplos (32 bits). Memórias de sistema e registradores de sistema não podem ser exportados diretamente.
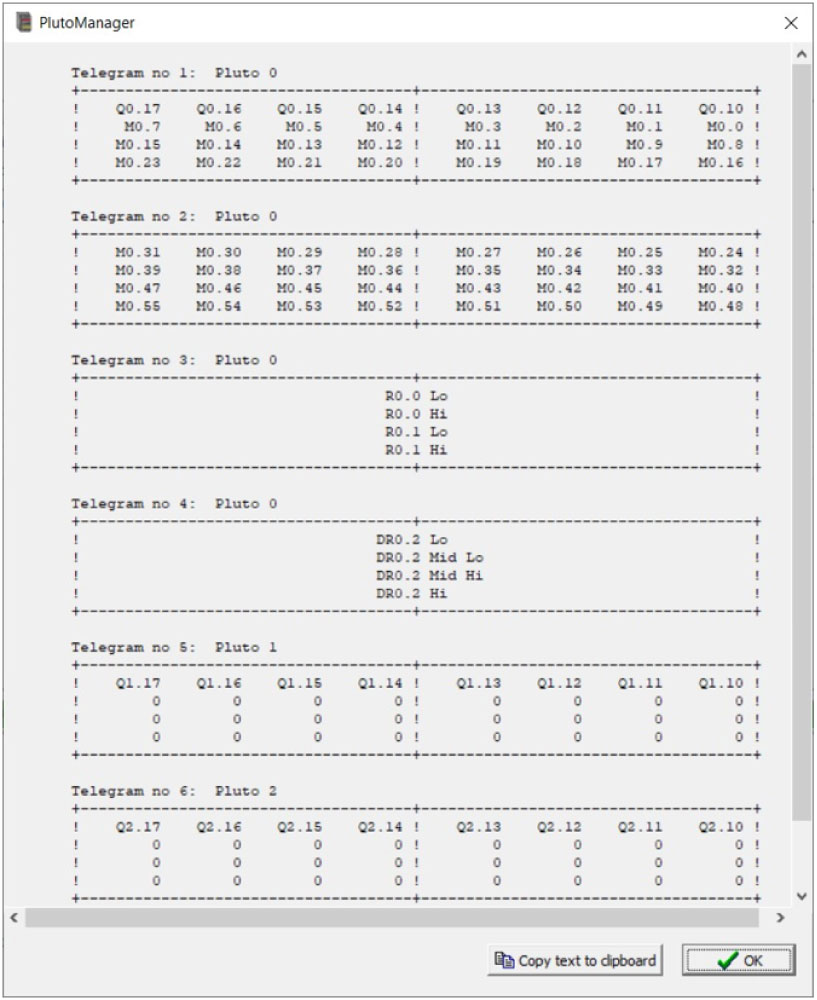
No menu “Tools” à “Export variable message map”, temos um mapa de todos os telegramas extras transmitidos na rede. O exemplo abaixo mostra o Pluto 0 transmitindo 4 telegramas completos, enquanto os Plutos 1 e 2 utilizam apenas 1 telegrama cada para transmitir algumas variáveis:
Se tentarmos exportar mais variáveis do que esses 4 telegramas comportam em um único Pluto, ou mais de 16 telegramas no projeto como um todo, uma mensagem será exibida no programa, alertando que o limite foi atingido:
PASSO 05 – PROGRAMAÇÃO EM REDE
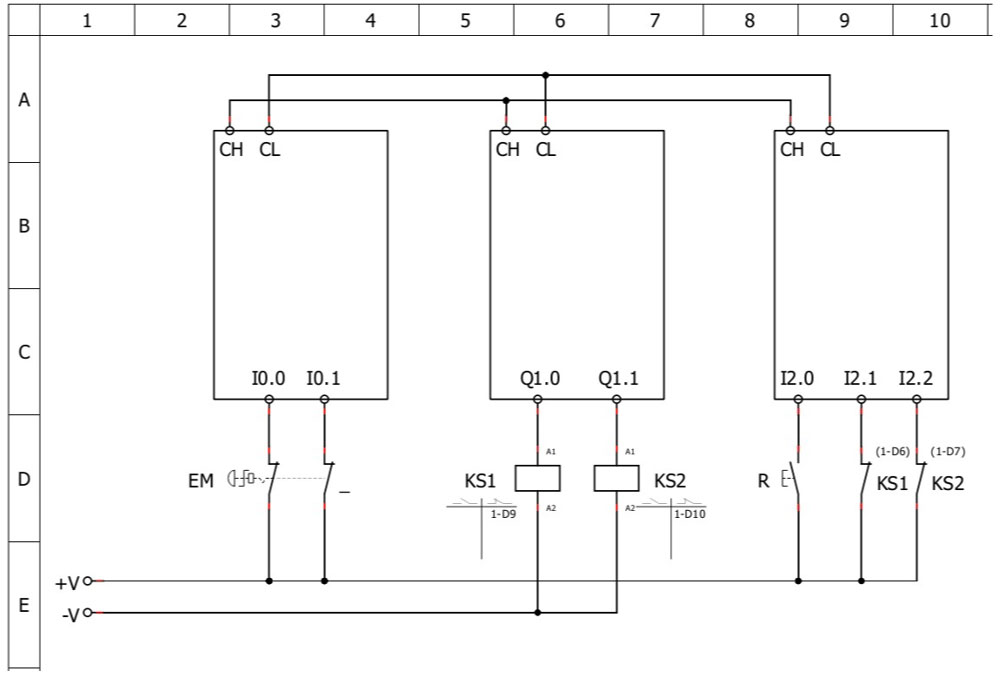
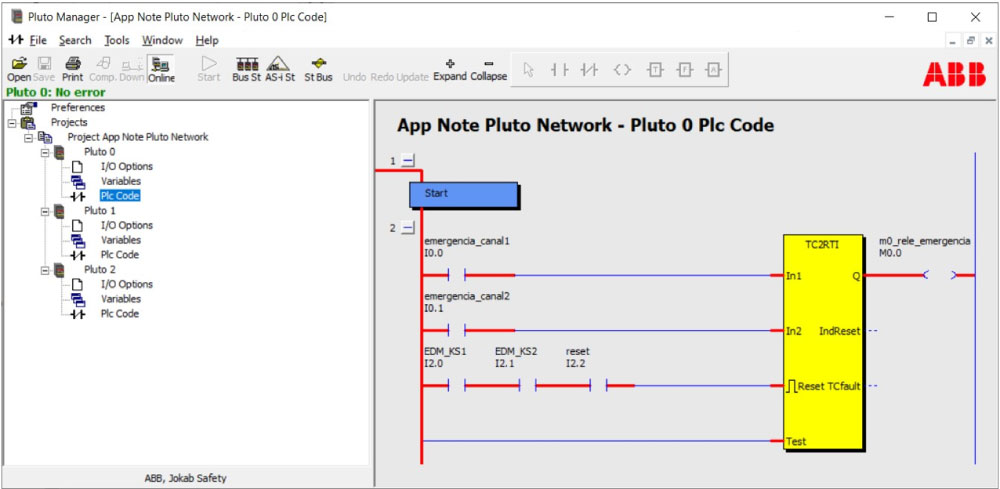
A título de exemplo, vamos criar um programa onde o Pluto 0 monitora um botão de emergência através das entradas seguras I0.0 e I0.1. Os contatores de bloqueio estarão nas saídas seguras Q1.0 e Q1.1 do Pluto 1, e os sinais de EDM dos contatores e do botão Reset estarão respectivamente nas entradas I2.0, I2.1 e I2.2 do Pluto 2.
O diagrama correspondente será este:
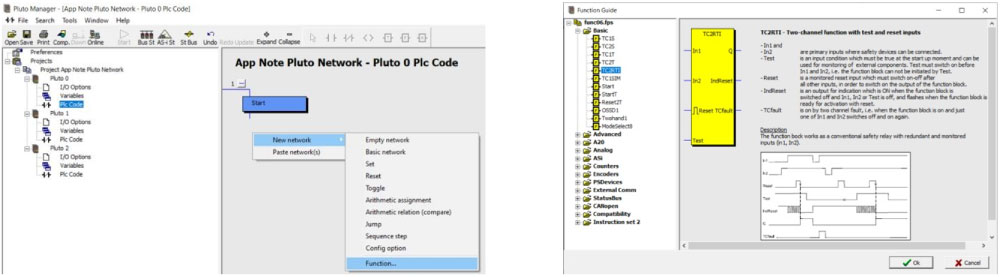
A seguir, implementamos o código para Pluto 0, criando uma nova Network do tipo “Function” no respectivo subitem “Plc_Code”, e escolhemos um bloco de função para o relé de segurança:
Em seguida vamos associar os terminais do botão de emergência, do Reset e dos contatos EDM com as entradas do relé de segurança. A memória M0.0 será utilizada para armazenar o status de saída:
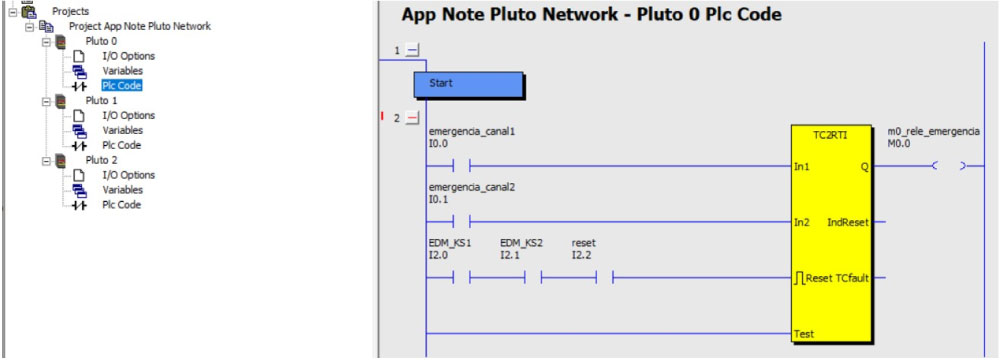
As variáveis I2.0, I2.1 e I2.2, do Pluto 2, podem ser lidas normalmente no programa do Pluto 0, pois são do tipo global. A ligação dos sinais EDM em série com o Reset é um requisito das normas de segurança, por isso sempre devem ser implementadas, ou no programa, ou eletricamente.
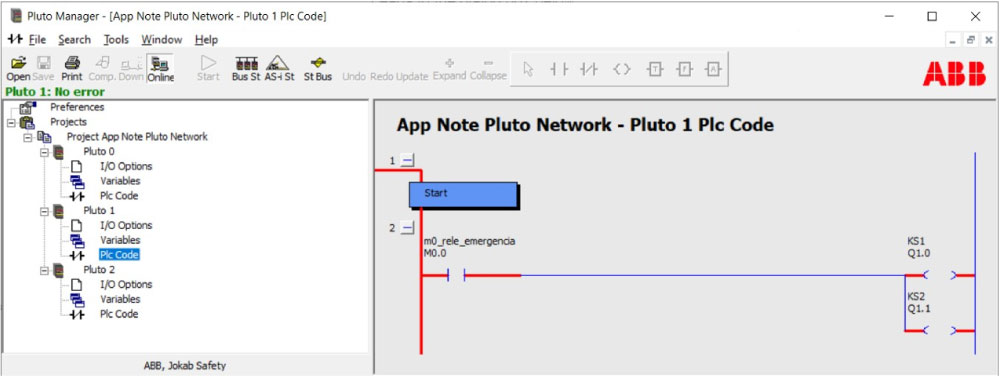
No Programa do Pluto 1, criamos uma Network para relacionar a memória M0.0, do Pluto 0, com as saídas dos contatores:

Neste caso, M0.0 é uma variável local do Pluto 0, e só pode ser lida pelo programa do Pluto 1 depois de ser marcada para exportação, como vimos anteriormente.
Note que as saídas Q1.0 e Q1.1 só podem ser escritas dentro do programa do Pluto 1. A rede permite apenas a leitura das variáveis globais e exportadas. Isso impede que haja sobreposição de escrita por programas diferentes.
É importante ressaltar que, em nosso exemplo, e o circuito de segurança depende da comunicação entre os controladores, e isso só é possível porque o controlador Pluto possui a certificação necessária para tal.
PASSO 06 – COMPILAÇÃO E VALIDAÇÃO DA REDE
Com este programa já temos um circuito completo de segurança funcionando a partir da comunicação em rede.
Basta compilar o programa utilizando o ícone da barra superior:

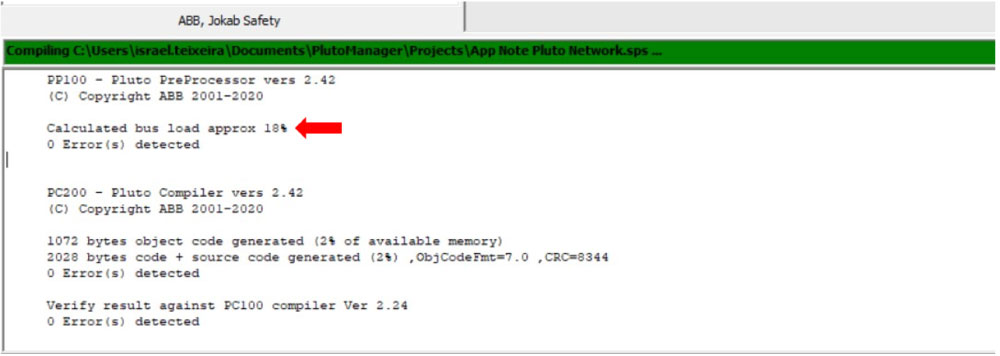
O compilador verifica se há erros de programação no projeto e também calcula a taxa de utilização da capacidade da rede, com base na quantidade de variáveis, na velocidade de tráfego e na frequência de atualização. Neste exemplo, estamos utilizando 18% da capacidade da rede:
É recomendado que a carga da rede não ultrapasse 60%. Se isso ocorrer, ajuste o tempo de ciclo ou a velocidade da rede. Ambas as configurações são acessadas com um clique sobre o nome do projeto na árvore lateral:
a) Na caixa de seleção “Baudrate Pluto CAN bus”, escolha uma velocidade entre 100kbps e 1000kbps:
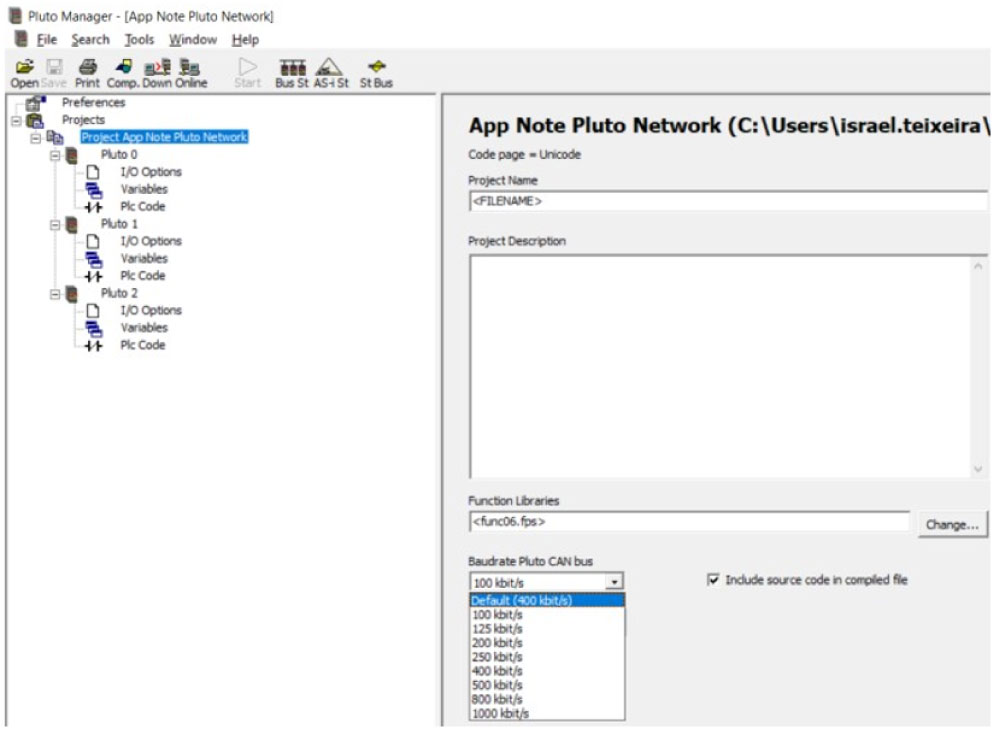
Quanto maior a velocidade, menor o percentual de carga da rede. Porém a velocidade máxima suportada deve ser compatível com a distância total de cabeamento da rede entre os módulos, tipo de cabo utilizado, interferências externas, etc. Em geral, não é praticável calcular esse limite previamente. Uma velocidade muito alta pode resultar em instabilidade na comunicação.
a) No botão “Advanced Settings”, escolher entre as opções, 10ms, 20ms, 30ms ou 40ms:
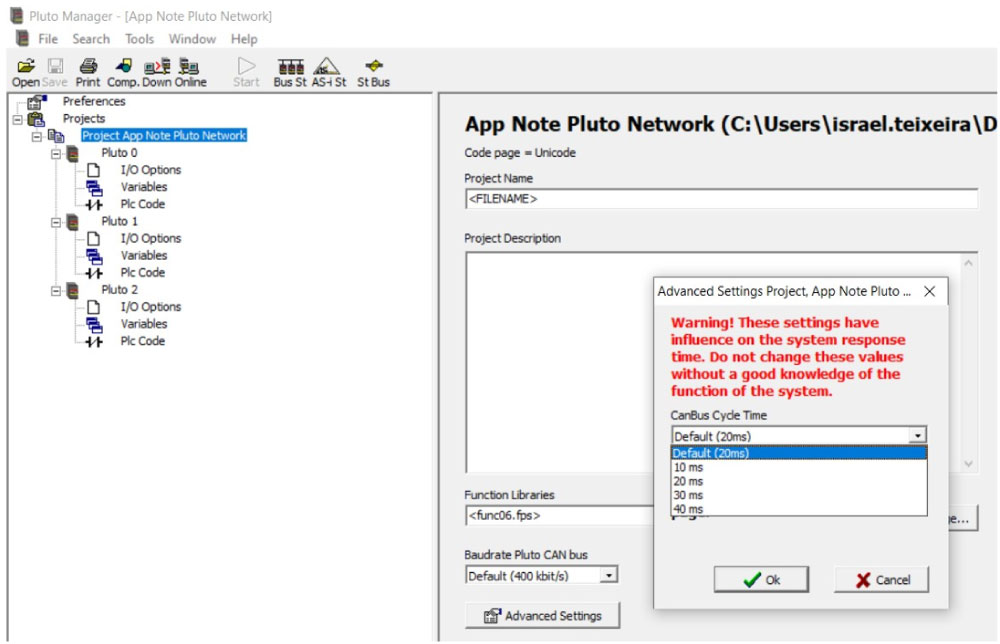
Quanto maior o valor do “CanBus Cycle Time”, menor será o percentual de carga da rede. Porém isso pode resultar em um maior tempo de resposta na leitura dos dispositivos de segurança.
Cabe ao projetista equilibrar esses dois parâmetros em conjunto com a infraestrutura elétrica adotada, a fim de assegurar a velocidade e a confiabilidade adequadas ao funcionamento do sistema.
PASSO 07 – DOWNLOAD E EXECUÇÃO DO PROGRAMA
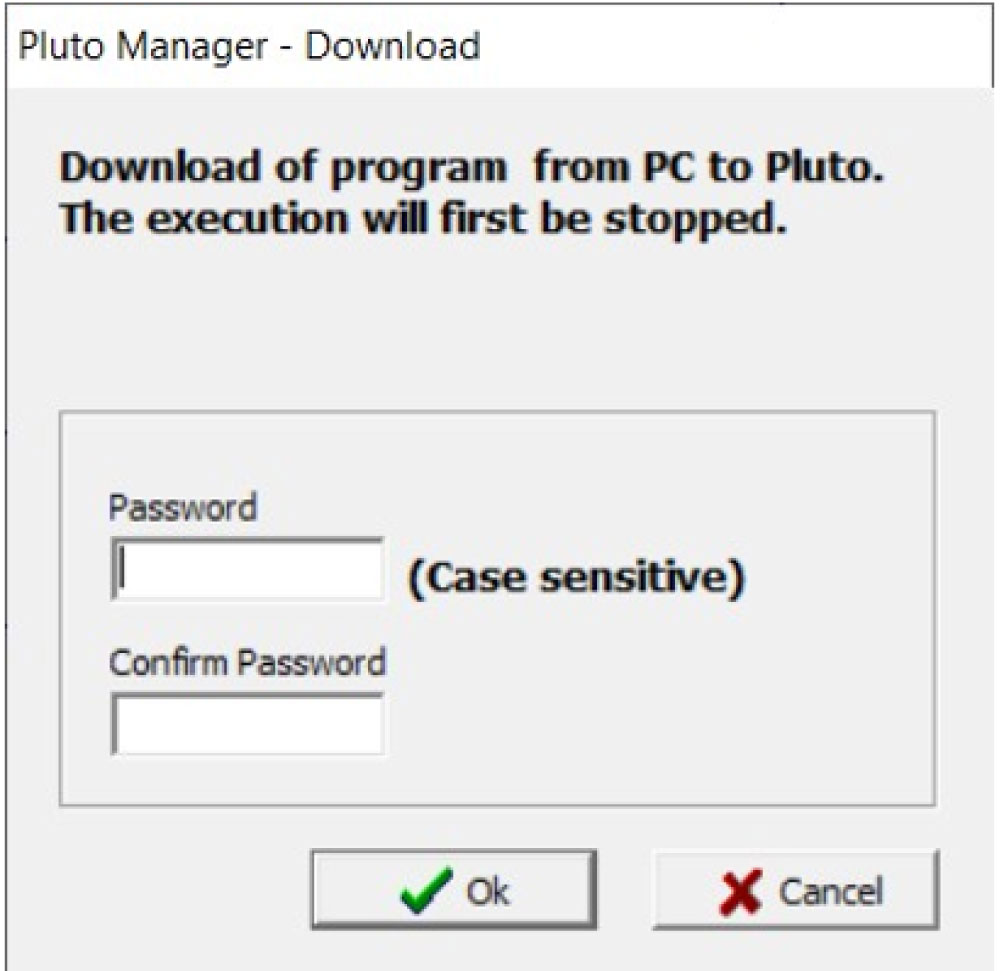
Uma vez que os critérios para a rede foram estabelecidos e não haja erros detectados pelo compilador, utilize o ícone da barra superior para descarregar o programa:

Se a memória dos controladores estiver vazia, será obrigatório criar uma senha para proteção do programa:
Se já houver um programa gravado, a senha cadastrada anteriormente será solicitada antes do download:
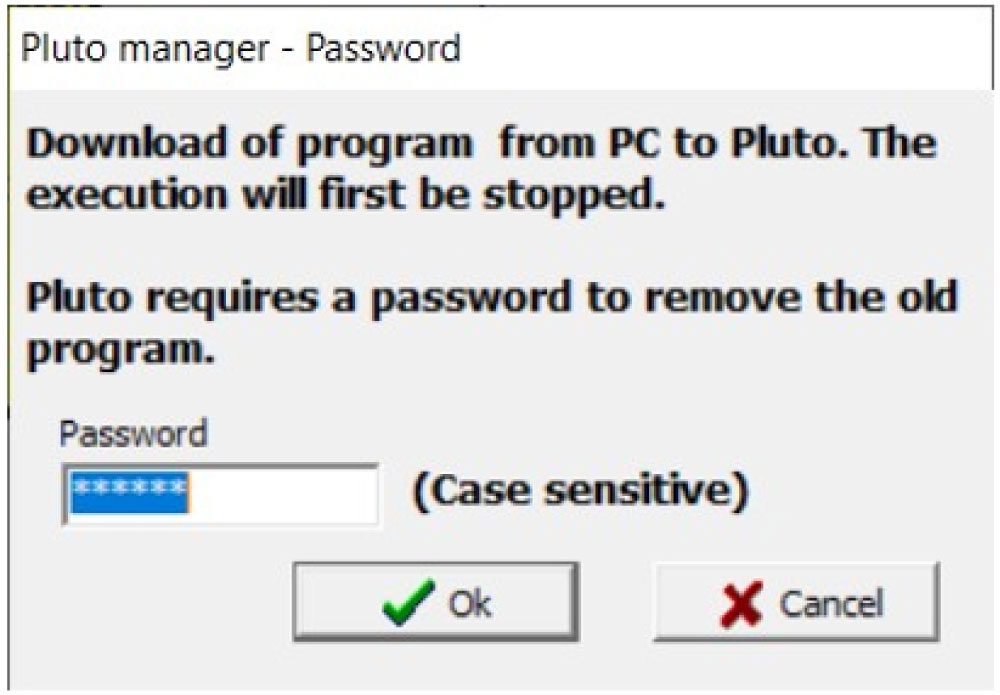
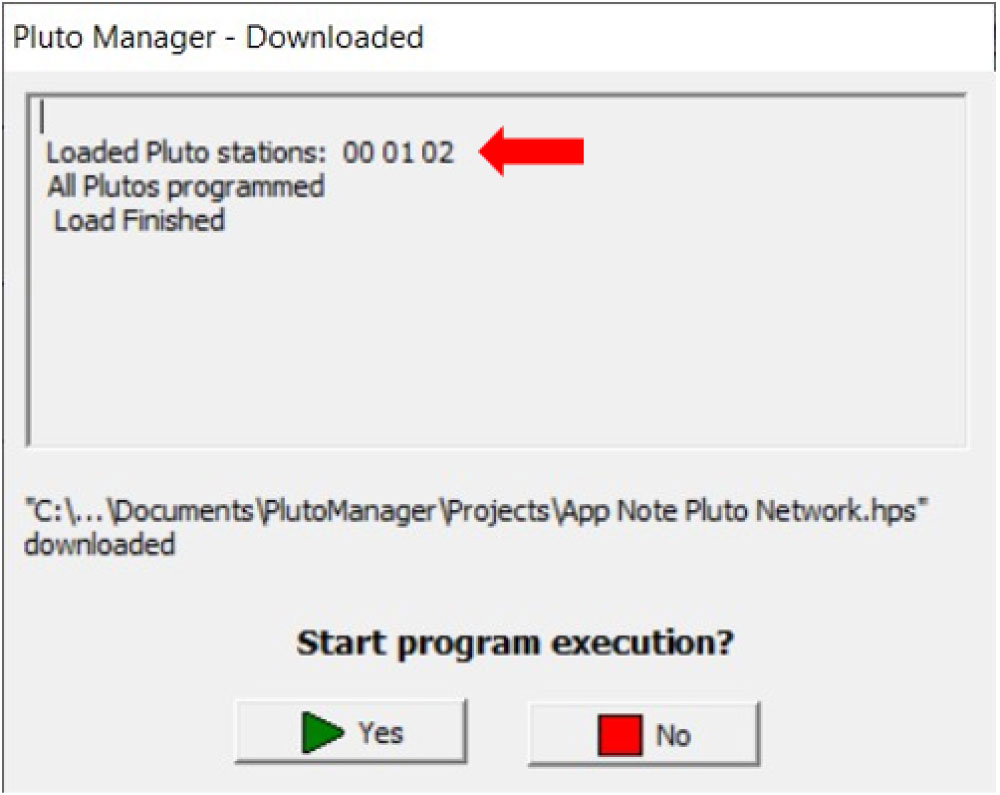
Após o download, confira se os números de todos os controladores do projeto estão presentes na mensagem que aparece, conforme abaixo, e inicie o programa:
Agora, ao aplicar uma tensão de 24V sobre as portas de entrada que utilizamos, já podemos observar que o programa do Pluto 0 lê corretamente as portas físicas do Pluto 2, que são variáveis globais, e que o programa do Pluto 1 é capaz de ler a memória local exportada do Pluto 0.
Revisão 1.0
Data: 19/12/2024
Documento elaborado pelo time de engenharia da Safety Control
Israel Teixeira – Gerente Técnico e-mail: engenharia@safetycontrol.ind.br
Telefone: (41) 3242-0316

Av. Presidente Wenceslau Braz, 2683 - Curitiba
81010-000 - Paraná - Brasil
Curitiba-PR
(41) 3242-0316
Toledo-PR
(45) 3197-2398
Maringa- PR
(44) 3112-0257
 0
0